【解放軍報】“北理精工”無人車亮相首屆地面無人平臺挑戰賽
發布日期:2014-10-01 供稿:解放軍報 編輯:新聞中心 趙琳 閱讀次數:
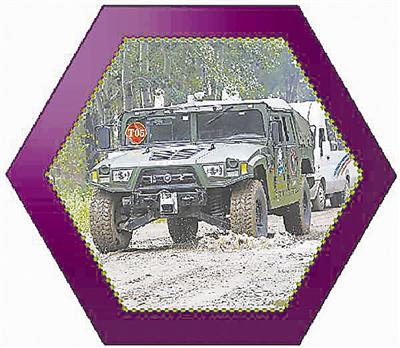
北京理工大學——
“北理精工”無人車
“精工”二字,多用于形容藝術作品的精美絕倫,敢用該名,必有其過人之處。該平臺是在東風猛士1.5噸級高機動性越野汽車的基礎上改裝而成,于2006年研制成功。它增加了電控制動回路、電控ECU模擬油門電壓信號,與原車制動踏板的電壓信號通過繼電器進行電控和人工控制的切換,配合并聯的一套電控雙回路制動系統,能更加方便地實現人工駕駛與自動駕駛的切換。此外,它的環境感知系統由攝像頭、多線激光雷達和單線激光雷達組成,實現了激光與圖像顏色信息的融合。
裝甲兵工程學院——
“鐵甲3號”無人車
作為此次參賽中為數不多的履帶車輛,裝甲兵工程學院在探索和解決履帶車輛自主機動運動控制方面確實下了一番狠功夫。該平臺由退役63式履帶裝甲輸送車改裝而成,成功實現了AMT控制、制動轉向控制、分離轉向控制和速度伺服控制。高性價比是它的優勢:采用氣動方案使得改裝成本大大降低,通過巧妙配置和專用運動機構,讓它采用的低成本單線激光雷達實現了多線雷達的感知效果。結合履帶車輛運動學和動力學特點,研究了履帶平臺的運動規劃方法,實現了自主道路跟蹤與避障功能。可以說,“鐵甲3號”在一定程度上為我軍退役裝備的改造和再利用探索了新的技術方向。
兵器地面無人平臺研發中心——
“鋸齒虎”無人車
該款輪型中型地面無人戰車除了震撼眼球的外表,其“戰斗能力”也不容小覷。針對無人車輛特點,采用全新一體化的設計,車輛戰斗全重5~7噸,承載能力不少于1.5噸。“鋸齒虎”采取“平臺無人、系統有人”的人在回路控制策略,集成先進的環境感知和路徑規劃技術,這就賦予了它自主行駛、遠程遙控、人工駕駛、近程遙控等多種機動控制方式,并且環境適應能力強,可用性高。
內蒙古第一機械集團有限公司——
“野牛”無人車
下面一串數字見證了“野牛”的霸道:越野環境自主行駛速度不少于20km/h,平直水泥道路環境最高自主行駛速度不少于40 km/h。“野牛”地面無人車研發團隊將車輛的感知、控制與駕駛融為一體,重點解決轉向控制、縱向速度控制和制動控制三大問題。此外,它還具備了地面正障礙識別與避障能力,初步的負障礙識別與避障能力,如此強力的機動性讓“野牛”無人車的實用前景更為光明。它的局部路徑規劃控制周期不大于100ms,并能實現離線仿真回放與數據存儲。
本版照片由楊歡、崔龍飛、周發軍提供
本版制圖:李紹偉
Copyright 1999-2014 81.cn All Rights Reserved.
本網站刊登的新聞信息和專題專欄資料,均為中國軍網版權所有,未經協議授權,禁止下載使用。
制作單位:解放軍報社網絡部 (瀏覽本網主頁,建議將電腦顯示屏的分辨率調為1024*768)
分享到: